ROSAIA: il manipolatore flessibile e intelligente per eseguire in sicurezza le operazioni nello spazio
È stato il Festival dello Spazio di Busalla il palcoscenico dove è stato presentato per la prima volta al pubblico ROSAIA, acronimo di “RObot parallelo continuo a Smorzamento Attivo su Intelligenza Artificiale”, un sistema robotico multibraccio coordinato e gestito nelle operazioni attraverso l’intelligenza artificiale.
Il progetto, finanziato dall’Agenzia Spaziale Italiana (ASI) e realizzato dall’Istituto Italiano di Tecnologia (IIT) ha l’obiettivo di studiare e sviluppare un robot spaziale di nuova generazione in grado di avere le caratteristiche di un manipolatore flessibile e capace di assorbire gli urti in modalità sia attiva che passiva. L’uso dell’IA fornirà anche la capacità di gestire in modo autonomo le operazioni a cui è applicabile.
A presentare il prototipo di ROSAIA durante il Festival di Busalla (Genova) sono stati la Project Manager di ASI Orietta Lanciano e il Project Manager per IIT Ferdinando Cannella, a capo dell’Industrial Robotics Facility dell’IIT di Genova.
I sistemi progettati per le operazioni e le attività in orbita (In-Orbit Servicing) devono funzionare in condizioni estremamente complesse, fra queste: la microgravità, l’assenza di attrito e la necessità di controllare con precisione la velocità e l’assetto sia del veicolo sia dell’oggetto da manipolare.
L’ambiente spaziale pone delle sfide importanti quando si tratta di dovere manipolare oggetti, siano essi controllati come i satelliti operativi, o incontrollati come detriti spaziali o satelliti non più funzionanti. Le sue caratteristiche di flessibilità e smorzamento attivo degli impatti sono stati pensati per rispondere alla necessità di performare un alto livello di sicurezza nelle manovre di avvicinamento, aggancio, ispezione e manutenzione di satelliti o di altri corpi come, ad esempio, i detriti in orbita nello spazio.
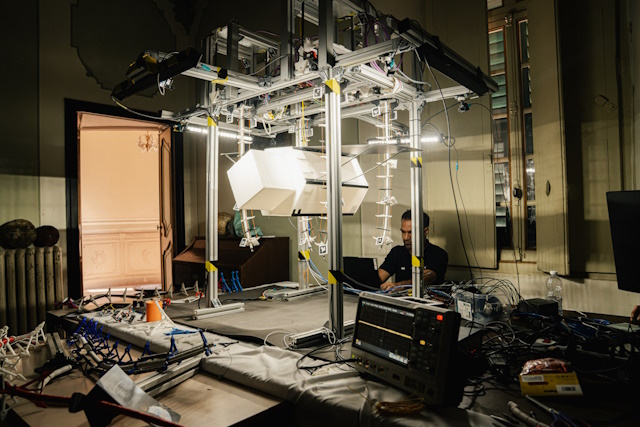
Il primo prototipo è stato realizzato con le dimensioni dei bracci di circa 75 centimetri, il suo design tuttavia è stato concepito per essere scalabile su differenti taglie, in funzione delle future applicazioni. Il prototipo presentato a Busalla è costituito da quattro bracci flessibili in grado di agganciarsi fra loro per assicurare la presa sicura del satellite o l’oggetto target.
L’architettura di controllo di IA dialoga con il satellite sul quale è a bordo per gestire i movimenti e garantire la sicurezza complessiva di tutto il sistema operante e operato.